Description du projet :
Un outil d’aide au diagnostic pour l’orthopédie du pied
L'hallux valgus, également appelé «oignon», est une déformation fréquente de l'avant-pied qui touche un adulte sur quatre et un tiers des personnes âgées, avec une prévalence féminine de 80%. Cette pathologie déforme l'alignement et déstabilise l'équilibre mécanique du pied, ce qui produit des douleurs sous l’avant-pied, perturbe la marche et augmente le risque de chutes. Aujourd'hui encore, un tiers des patients est insatisfait du traitement chirurgical censé corriger la déformation et permettre un retour aux activités de la vie courante.
Ceci est principalement lié au taux de complications qui résulte de l’intervention. A court terme, il s'agit essentiellement d'un besoin de repratiquer un geste chirurgical et, à long terme, de douleurs chroniques.
Lorsqu’un patient souffre de ces symptômes, il consulte d’abord un chirurgien orthopédiste qui réalise, entre autres, un examen clinique pour évaluer l’équilibre biomécanique de l’avant-pied. Cette palpation manuelle permet de détecter une instabilité provenant des articulations du médio-pied et, ainsi, oriente le chirurgien vers le choix de la technique opératoire la plus adaptée (lorsqu’une chirurgie est nécessaire).
Cependant, les résultats obtenus dépendent largement de la façon dont l'examen est réalisé et varient selon le jugement subjectif de chaque chirurgien.
Pour cela, notre équipe a développé un outil d’évaluation appelé LaxiPed qui mesure de manière objective l'instabilité de l'avant-pied dans une position simulant une charge sous le pied. Suivant la même approche biomécanique que l'examen manuel, cet instrument évalue la déformation des articulations tarsométatarsiennes en fonction d’une force appliquée en proposant une série d’indicateurs.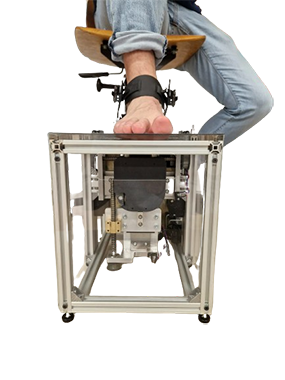
Pour diminuer l’impact du facteur humain, la mesure est complètement automatisée et permet de récolter des données quantitatives de manière fiable et rapide, ce qui la rend parfaitement adaptée à une utilisation en salle de consultation.
Ce projet a reçu un financement Innosuisse (sans partenaire d’implémentation) de 2022 à 2024. Il a été mené en collaboration avec le centre ASSAL à Genève et le laboratoire du Professeur Sylvain Hugon de la HEIG-VD. De plus, une startup est en cours de création par M. Quentin Praz et M. Spyridon Schoinas afin de continuer le développement et la commercialisation de cet outil.
Forschungsteam innerhalb von HES-SO:
Olivier Jeremy
, Hugon Sylvain
, Glück Florent
, Voëffray Julien
, Mangano Giovanni
, Da Silva Marques Gabriel
Partenaires académiques: Passeraub Philippe, BYU, anciennement HEPIA; Praz Quentin, Anciennement HEPIA; Schoinas Spyridon, Anciennement HEPIA; Beuchat René, Anciennement HEPIA
Durée du projet:
01.09.2022 - 31.03.2024
Montant global du projet: 571'429 CHF
Url des Projektstandortes:
https://www.hesge.ch/hepia/recherche-developpement/projets-recherche/laxiped
Zustand : Abgeschlossen

 SWITCH edu-ID
SWITCH edu-ID
 Verwaltung
Verwaltung



